To je prvi primjerak rase robota, rekao je Tesla daleke 1898. godine za svoj brod automat s kojim je upravljao bežično u New Yorku. Nitko tada nije bio svjestan da je Tesla pokrenuo razvoj buduće tehnike automatskog upravljanja bežičnim putem na daljinu Davno prije Googlea, Tesle i Ubera postojala je ideja da automobili voze sami. Zapravo ideja automobilske autonomnosti u kulturi motorizacije stara je više od stoljeća. Netom što se automobil etablirao na sceni kao primarno sredstvo motorizacije, umjetnici i inženjeri počeli su s imaginacijom vozila koja neće nužno trebati čovjeka za upravljačem.

Houdina Radio Control
Početkom 1925. napravljen je prvi praktični korak prema autonomnim vozilima. Inovator i bivši vojni inženjer Francis Houdina izradio je radio kontrolirano vozilo Houdina Radio Control. Houdina je svoje vozilo uputio odmah na prometne ceste u New York Cityja i testnu vožnju završio bez incidenta. Autonomnim Houdina vozilom upravljano je radio signalima iz pratećeg vozila koje ga je slijedilo.
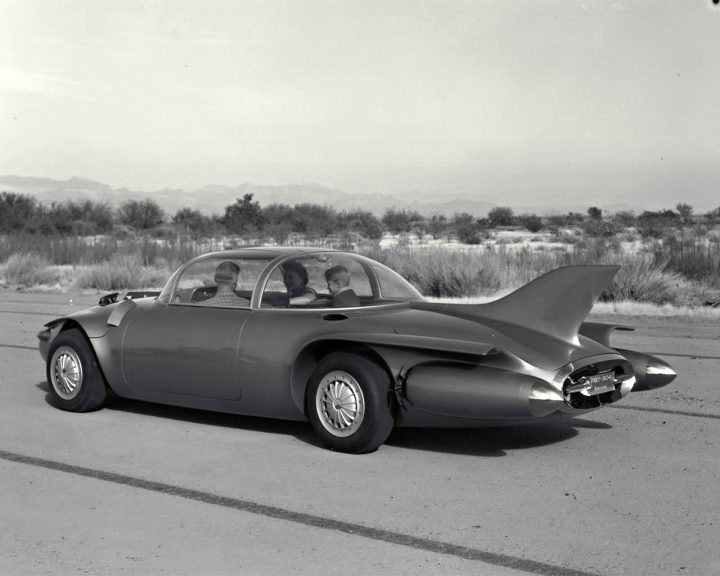
General Motors Firebird II
Ideja s pratećim vozilom bila je tek korak prema budućnosti izuma. Inovator je želio da se u budućnosti autonomno vozilo navodi putem radio signala koji bi se emitirali s telefonskih žica postavljenih uzduž ceste. Tek nekoliko dekada kasnije taj projekt aktualizirali su američki proizvođači promicanjem ideje o autocesti budućnosti. Osim što je bio inovativan zbog pogona plinskom turbinom, General Motorsov koncept Firebird II predstavljen 1956. izniman je i upravo zbog predviđene autonomnosti. Vozač bi preko TV ekrana u unutrašnjosti uspostavio kontakt s operatorom u kontrolnom tornju, koji bi potom vodio vozilo po auto cesti putem metalne trake u sredini puta. Potrebno je bilo samo da se stražnja kontaktna lira na Firebirdu II položi na metalnu traku i time bi vozilo dalje preuzimao operater iz kontrolnog tornja.
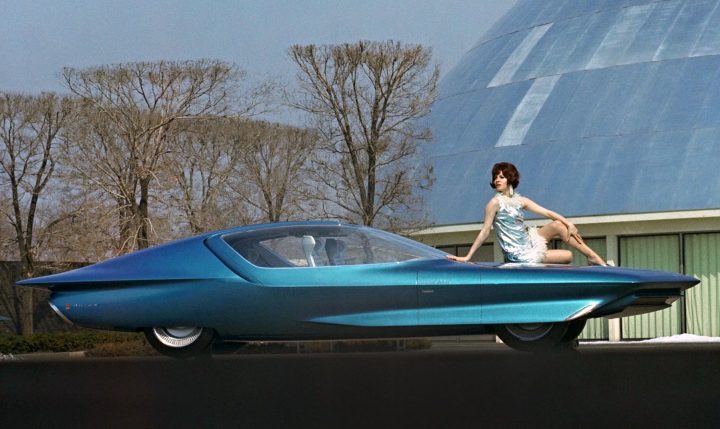
Buick Century Cruiser
Automatizirana autocesta budućnosti bila je zamišljena i za koncept Buick Century Cruiser 1969. Dizajneri i inženjeri osmislili su automobil visokih performansi i udobnosti namijenjen za duga putovanja automatiziranim auto cestama. Vozač je trebao samo u elektronski sistem Buicka staviti programiranu karticu sa željenom rutom i dalje bi sustav preuzeo nadzor nad vozilom do cilja. Kada govorimo o autonomnim vozilima ne smije se zaboraviti na njemačkog znanstvenika Ernsta Dickmannsa koji je početkom osamdesetih opremio Mercedesov kombi kamerama i senzorima putem kojih je ostvario kontrolu nad upravljačem, akceleratorom i kočnicama. Zbog sigurnosnih razloga prvi su testovi rađeni na cesti bez prometa u Bavarskoj.

Mercedes-Benz VaMP

Još 1986. je auto robot VaMoRs programiran za samostalnu vožnju, a godinu kasnije ostvario je autonomnost vozeći brzinom 96 km/h! Najveći izazov tada Dickmannsu i njegovom timu bile su rapidno brze izmjene krajolika pri višim brzinama koje je računalo trebalo u realnom vremenu obraditi pri navođenju vozila uz puno sporija računala od današnjih. Projekt EUREKA Prometheus (1987-1995.) i budžet od nekoliko stotina milijuna eura najizdašniji je do sada raspoloživih za inovacije u auto industriji – među njima primarno vezane za autonomnost automobila. Dickmanns je snage u okviru tog budgeta udružio sa Mercedes Benzom i tako nastaje posebna S klasa (W140) VaMP (Versuchsfahrzeug für autonome Mobilität und Rechnersehen). U listopadu 1994. S klasa je bez problema u Parizu demonstrirala autonomnu vožnju auto cestom sa tri trake pri 130 km/h u konvoju s pratećim vozilima. Godinu kasnije Dickmanns se S klasom odvažio na put München-Odense-München (1758 km).
Na auto cesti robot je kontrolirao vozilo pri brzini od čak 175 km/h, a najviše 158 km robot je prešao bez ijedne ljudske intervencije. Čak 95 posto rute na kraju je savladano isključivo autonomnom vožnjom. DARPA Grand Challenge bio je potom projekt američkog ministarstva obrane s prvim raspisanim natječajem 2004. godine i fondom od milijun dolara nagrade za najbolje autonomno vozilo. Natječaj je ponovljen 2005 i 2007., svaki puta sa višim nagradnim fondom, a neke od sudionika upravo je regrutirao i Google za svoj projekt do tada najnaprednijeg autonomnog vozila predstavljenog 2009. godine. Autonomna vozila i njihova tehnologija ubrzano se razvijaju, ali problem je što taj razvoj adekvatno ne prati infrastruktura potrebna kako bi autonomna vozila zaživjela u potpunosti u svakodnevnom prometu bez izrazitih rizika za sudjelovanje u prometu. Nakon gotovo stoljeća razvoja konačno bi bilo je vrijeme da futur postane prezent!
